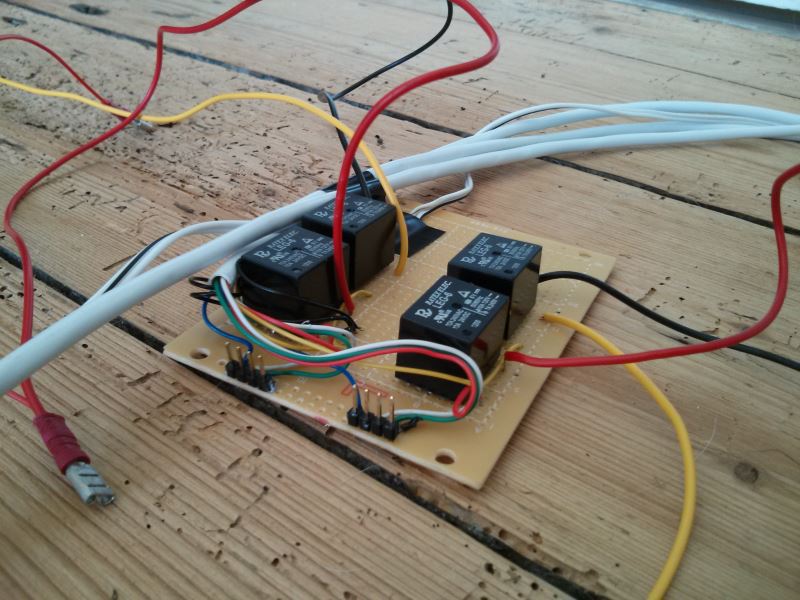
It’s taken a while but I’ve finally gotten around to doing the wiring for the relay array. This involved striping and tinning wires to stop them fraying in the screw terminals. The wires I am using are much higher gauge than they really need to be for the 12V 2A maximum going through them.
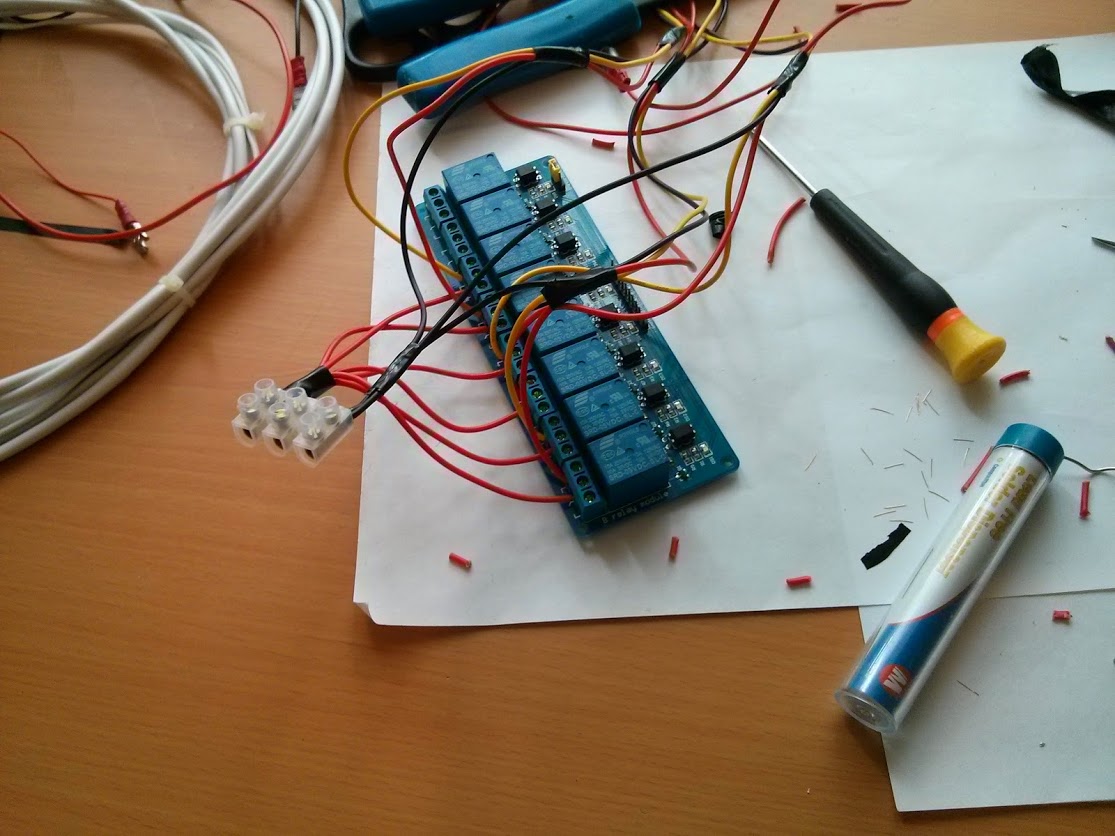 The original pumps I used had spade connectors but unfortunately the self priming ones I have don’t so I’ll be getting some when I get the chance, I want to make it easy to swap out parts and avoid having anything soldered when it doesn’t need to be. I’ve also connected a pair long wires to the main power terminal to take it to the external power supply.
The original pumps I used had spade connectors but unfortunately the self priming ones I have don’t so I’ll be getting some when I get the chance, I want to make it easy to swap out parts and avoid having anything soldered when it doesn’t need to be. I’ve also connected a pair long wires to the main power terminal to take it to the external power supply.
 The valves appear to do what I want and have been attached to the pumps, I’ve placed them before the intake so that water remains in the pump and means it doesn’t have to self prime but can when it’s first turned on.
The valves appear to do what I want and have been attached to the pumps, I’ve placed them before the intake so that water remains in the pump and means it doesn’t have to self prime but can when it’s first turned on.
 I checked my solenoid valves and found that they still had water in them after a year and that the hose fittings had corroded slightly and stained the tubes. I drained them and thankfully they still worked. I’ll have to make sure I remove all the water from it when it is not in use.
I checked my solenoid valves and found that they still had water in them after a year and that the hose fittings had corroded slightly and stained the tubes. I drained them and thankfully they still worked. I’ll have to make sure I remove all the water from it when it is not in use.
After getting and fitting the spade connectors my next concern is with the plumbing and how to make the most of the space provided by getting rid of the hand primer pumps and how to wire the three pressure sensors. I’ll probably also have a look if there is now a better way to send control signals to the Arduino from the net.